
.webp?width=1921&height=622&name=usecase-banner%20(1).webp)
Among the established technologies in the developing automotive industry, computer vision is crucial in enhancing vehicle safety and monitoring systems.
Using various algorithms and machine learning, computer vision systems understand visuals from the vehicle’s environment and facilitate several advanced safety features, improving drivers’ experience and reducing accidents. Facilitates several advanced safety features, improving drivers’ experience and reducing accidents. This blog reviews the state of affairs of computer vision in automotive safety to cover its role and underlying implementation platforms, the use cases, opportunities, and limitations.
Introduction to Computer Vision in Automotive Safety
Computer vision is a branch of AI where data or information is retrieved, processed and understood from images and videos. Computer Vision systems in the automotive safety field extract information from different sensing devices—chiefly cameras to constantly observe the environment, driver behaviour, and car state. These systems are the core platforms for ADAS and are critical to the evolution of autonomous vehicles.
Key Applications of Computer Vision in Vehicle Safety
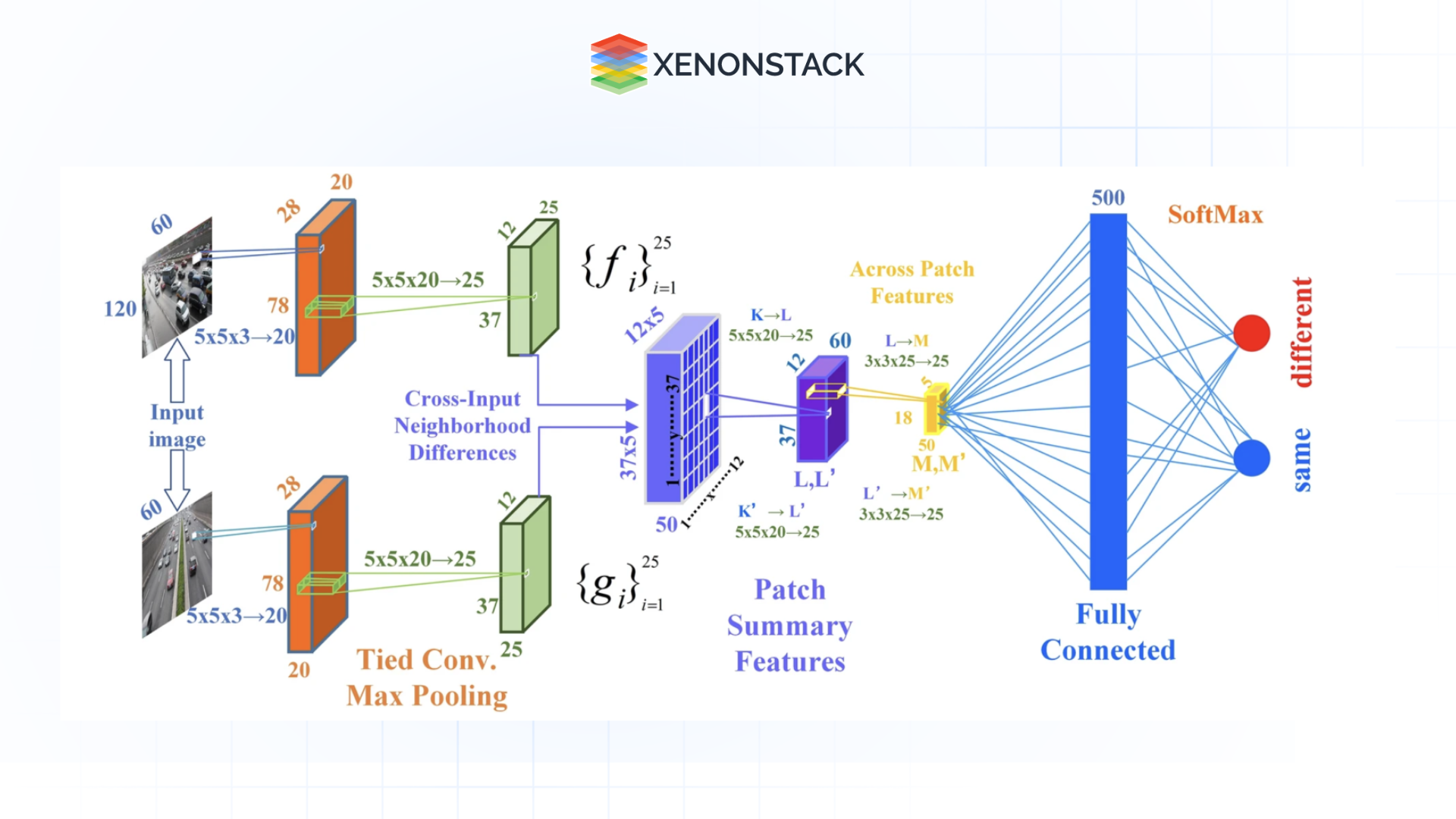
 Fig 1.0: Key Applications of Computer Vision in Vehicle Safety
Fig 1.0: Key Applications of Computer Vision in Vehicle Safety -
Advanced Driver Assistance Systems (ADAS)
ADAS covers a spectrum of tools that aim to help the driver perform certain tasks while on the road and create a safer and more comfortable environment in the car.
Key ADAS features enabled by computer vision include:
-
Adaptive Cruise Control (ACC) uses cameras and radar to encode a safe distance to the car ahead and maintain the speed.
-
Lane Keeping Assist (LKA): Utilizes edge detection algorithms to identify lane markings and either provides steering commands or notifies the driver about deviations in the car from the lane.
-
Automatic Emergency Brakes (AEB): Detect the possibility of colliding with other objects on or off-road by calculating the distance and velocity between the two objects and applying brakes to avoid or reduce the risk of the collision.
-
Collision Avoidance Systems
Collusion avoidance systems work on computer vision, which helps identify possible hurdles that exist on the road. Techniques such as object detection, tracking, and trajectory prediction are fundamental:
-
Object detection methods include YOLO (You Only Look Once) and Faster R-CNN, which detect and recognise objects (vehicles, pedestrians, and cyclists) in real-time.
-
Tracking: The multiple object tracking algorithms can track the same objects from frame to frame to provide accurate trajectory.
-
Trajectory Prediction: Other models predict future positions of detected objects, thus enables the system to take prior actions to avert an accident.
-
Driver Monitoring Systems (DMS)
Maintaining the drivers’ alertness during their driving is essential for vehicle safety. Computer vision-based DMS employs facial recognition and gaze tracking to monitor driver state:
-
Facial Recognition: The driver’s face and main features are recognized to estimate attentiveness and check for drowsiness or distraction.
-
Gaze Tracking: Eye tracking and the frequency of blinks determine whether a driver is devoted to the road or involved with other tasks, such as texting.
-
Traffic Sign and Signal Recognition
It is always important to know your signs and signals as a driver when you are on the road. Computer vision systems recognize and interpret various road signs, traffic lights, and signals:
-
Traffic Sign Recognition (TSR) uses deep learning, specifically convolutional neural networks (CNNs), to identify and translate road traffic signs, communicating to the driver when to slow down, stop, or obey other regulatory signs.
-
Traffic Light Detection: It detects traffic light colours, including red, yellow, or green, which in turn helps the vehicle decide whether to stop at a red light or get ready for the green light, among other things.
-
Surround View and Parking Assistance
Computer vision enhances low-speed manoeuvres through surround view systems and parking assistance:
-
Surround-view systems Use signals from various cameras placed around the vehicle to create a bird' s-eye view of the surrounding environment, which can help to manoeuvre around the car when parallel parking.
-
Parking Assistance: Identifies available parking and no-parking zones and gives live directions for parallel or perpendicular parking.
Underlying Technologies and Algorithms
-
Image Processing and Feature Extraction
As a critical part of computer vision, image processing requires various activities, including noise removal, scaling, and contrast stretching. Edge detection (Sobel, Canny), corner (Harris) and key points descriptors (SIFT, SURF) are applied to discover important characteristics of the visual data.
-
Machine Learning and Deep Learning
Machine learning algorithms, particularly deep learning models like CNNs, have revolutionized computer vision in automotive applications:
-
Convolutional Neural Networks (CNNs): Learn (without any human intervention) the compound/binary features needed to excel at image classification, object detection, and segmentation.
-
Recurrent Neural Networks (RNNs) and Long-Short-Term Memory (LSTM) Resolve important temporal relations to identify a track or predict its path.
-
Generative Adversarial Networks (GANs): Improve Experience Replay and represent various driving situations to build a better model.
-
Sensor Fusion
This is because incorporating images, laser, and radio data into the computation process of a car’s perception apparatus makes it more precise. Data fusion compensates for individual sensors' weaknesses and offers an improved representation of the vehicle's surrounding environment. Automating Financial Document Processing with Computer Vision.
-
Real-Time Processing and Edge Computing
Due to the essence of the car business, manufacturing applications need to process and communicate data in real time. Integrated hardware such as GPUs and TPUs enable edge-computing solutions that enable fast Times to Solution, enabling algorithms to run directly on the vehicle in real time without delay.

Challenges in Implementing Computer Vision for Vehicle Safety
-
Environmental Variability
LIDAR systems are affected by light fluctuations, weather conditions, and complicated backgrounds, which are hard to handle in computer vision. Thus, models must be trained on different data to sustain high performance in various conditions.
-
Computational Constraints
The question of meeting high computational requirements while working on cars with comparatively low computation power and narrow power consumption constraints has remained. Indeed, efficient algorithm design and efficient hardware implementation are crucial to achieving real-time processing targets without high power consumption.
-
Data Privacy and Security
Gathering and analyzing visual information can be problematic for the driver’s privacy and information security. Protecting user data and adjusting privacy laws are crucial for creating confidence and protecting the system.
-
Regulatory and Standardization Issues
The automotive industry has significant safety requirements and legal imperatives that must always be met. Achieving and demonstrating the adoption of these standards for constructing computer vision systems form the basis of extensive test, validation, and certification programs. Computer Vision for Automated Assembly Line Inspections.
-
Adversarial Robustness
There is a major issue of model robustness or adversarial attacks, in which a model is programmed to produce an incorrect output for a small modification to the input data. Therefore, improving the models' ability to resist such attacks is important for better system dependability and safety.
Future Directions and Innovations
Conclusion
It is crystal clear that computer vision is the new frontier revolutionizing how cars are driven and controlled by developing complex vehicle safety and monitoring solutions. Self-driving technology results from sophisticated algorithms acquired, real-time processing, and sensor fusion technologies that make a vehicle accurately identify the environment in which it operates. Challenges still affecting it today include environmental fluctuations, computational limitations, and security concerns.
But, as pointed out earlier, ongoing work, experiences, or new developments go on to redefine feasibility. That is why computer vision systems will become increasingly important as they are integrated into roadways, making them safer and providing a more secure and efficient future for driving.
More Ways to Explore Us
Generative AI in Computer Vision Drives Productivity
Workflow of Computer Vision: From Data Acquisition to Decision Making
Computer Vision Services and Solutions




